OTAVALO, Imbabura. La empresa Sunlit obtuvo el código VIN con el cual puede fabricar este prototipo de vehículo.
Las modificaciones y personalizaciones de los autos siempre cautivaron a José Antonio Mejía, un mecánico que desde hace 30 años se dedica al sector automotor en un sencillo taller, ubicado en el barrio Punyaro.
Por su mente siempre pasó la idea de reparar un vehículo y ponerle un aditamento que lo diferencie de los demás. Esas iniciativas de a poco se fueron tecnificando y haciendo más notorias para sus clientes.
De tantos arreglos y cambios surgió un proyecto: crear un propio modelo automotor.
Hace cinco años, junto con Romel, su único hijo varón, decidieron emprender esa iniciativa que hoy es considerada la primera a nivel nacional en este sector.
A inicios del 2009 salió a la luz el producto final: Sunlit, el nombre con el que decidieron bautizar a un prototipo, cuyas características mezclan lo clásico y contemporáneo. Este tiene capacidad para dos personas.
Terminado el vehículo, las autoridades de la ciudad invitaron a sus creadores a exhibirlo en una feria. A partir de ese momento, por los contactos realizados, comenzaron a tener más invitaciones, incluso, a través del Ministerio de la Producción llegaron a Guayaquil para intervenir en la Feria de Durán.
El llamativo modelo fue patentado, aunque sus inventores no tienen registro de la inversión exacta que demandó su construcción. "No hay un cálculo, pero es demasiada inversión y mi padre fue el único que aportó los recursos económicos", señala Romel Mejía.
Supone que en este momento el valor comercial de los dos prototipos que poseen y que son impulsados por motores San Remo de 1.600 centímetros cúbicos bordearía unos 40 mil dólares.
Dice que este es un valor referencial y que posteriormente, cuando se levante una planta de producción y se construya a mayor escala, ese costo podría ir disminuyendo.
Ahora, Sunlit cuenta con el VIN, un código con el cual podría iniciar la producción de este vehículo personalizado. De allí que espera el apoyo del Gobierno para seguir apuntalando este proyecto.
"No pedimos que (el Gobierno) nos regale nada, sino tan solo que nos dejen hacer y que nos apoyen legal y técnicamente en la elaboración de unos estudios definitivos que hacen falta", reconoce.
Aspira a que con el tiempo se sumen más profesionales de la rama automotriz a la futura empresa, para ir incorporando componentes locales a la parte mecánica del auto. "Eliminemos ese estigma empresarial de egoísmo, hagamos una sola fuerza para que el Ecuador tenga una marca propia de vehículos; luego el éxito será del Ecuador y no solo de los Mejía", manifiesta.
Actualmente Sunlit (término en inglés que significa iluminado por el sol) no es solo la marca del prototipo, sino una compañía limitada que les permitirá seguir creciendo en su objetivo. La premisa de Sunlit es fabricar el diseño que actualmente poseen, pero no en serie como lo hacen otras marcas, sino bajo pedido.
Antonio se muestra orgulloso de su hijo. "Me parece un sueño; no estaba previsto que mi hijo siga esto, nunca lo obligué a seguir mis pasos. Este logro fue gracias al impulso de él y me alegro que cada día quiera ser mejor", dice el hombre que en sus inicios únicamente se empleaba en la reparación y afinación de motores.
Para Antonio Mejía, los artesanos son la principal fortaleza y empresa del país porque es un gremio unido, y por eso dice que necesitan de todo el apoyo de las instancias gubernamentales para no sentirse minimizados.
Luis Fernando Cantor Bueno
Ing. Electrónica ,CRF
martes, 10 de mayo de 2011
Re: Mecánico creó auto personalizado

Re: Tendencias en los Sistemas de Control Abiertos
El control avanzado es sin duda uno de los pilares de la oferta tecnológica del Departamento de Control y TIC del Centro Tecnológico Fatronik. De hecho la actividad más industrial del departamento se centra en la personalización del control numérico de máquinas muy específicas con unos estrictos requerimientos cinemáticos, junto con el desarrollo de controladores a medida para dispositivos y accionamientos específicos, incorporando procesos de sensorización/actuación.De todas formas la actividad del Departamento de Control y TIC no se centra únicamente en el área del control avanzado. Así, se trabaja en el desarrollo de servicios de gestión, monitorización o control en diferentes ámbitos, tanto industriales como sociales, combinando la integración multisensorial junto con servicios de comunicación y computación ubicua.
Tras muchos años en los que la oferta tecnológica del departamento se ha centrado en estas áreas, y en concordancia con las nuevas líneas estratégicas de Fatronik, el departamento ha ampliado dicha oferta adentrándose en el "mundo socio-asistencial", proporcionando la base tecnológica necesaria en forma de dispositivos y servicios asistenciales, enfocados al colectivo de los discapacitados y personas mayores. Por último, la investigación en la línea de la robótica asistiva, completa la oferta tecnológica de este departamento en constante evolución, y adaptación a las demandas evidentes de la sociedad actual y futura.
El presente artículo describe una de las actividades actuales del Departamento de Control y TIC en temáticas de control avanzado, basada en el desarrollo de arquitecturas abiertas para los controladores industriales.
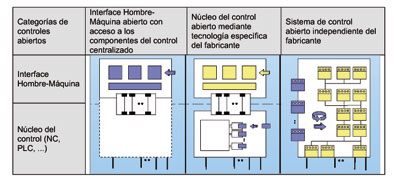
Figura 1. Categorías de controles abiertosSistemas de Control Abiertos
Los sistemas de control son uno de los componentes críticos a la hora de obtener la mayor productividad de las máquinas herramienta y otros bienes de equipo. La mayor parte de los sistemas de control han sido diseñados sobre arquitecturas con software incompatible y con unas muy limitadas capacidades de comunicarse con otros controles u ordenadores externos. Tradicionalmente la única funcionalidad ofrecida consistía en la carga y descarga de programas pieza o de tablas de herramientas y las posibilidades de integración con dispositivos externos se basaba en las entradas y salidas digitales combinadas con la programación del PLC integrado en el Control.En la siguiente tabla podemos resumir las principales diferencias entre un sistema de control abierto y un sistema tradicional:
Sistema tradicional (Propietario)
- Gran esfuerzo de adaptación a la máquina
- Know-how específico del fabricante de la máquina difícilmente integrado en el control
- No es posible desarrollar software independiente
- Alta dependencia del fabricante de la máquina respecto del suministrador del control
Sistema de control abierto
- Topología modular con interfaces estándar
- Módulos de diferentes suministradores interoperables
- Topología y rendimientos escalables
- Fácil portabilidad a otras plataformas hardware
En el mercado se ofrecen cada vez un mayor número de controles abiertos, aunque cada uno de ellos ofrece un nivel de apertura diferente. Por ello vamos a introducir las diversas posibilidades existentes :
Categorías de controles abiertos:
- Interface Hombre-Máquina abierto con acceso a los componentes del control centralizado
- Núcleo del control abierto mediante tecnología específica del fabricante
- Sistema de control abierto independiente del fabricante
Es muy importante distinguir entre los diferentes niveles de apertura proporcionados por un control ya que ello condiciona de una forma determinante las posibilidades de particularización del control y la funcionalidad que es posible integrar en cada caso. Como vemos en la figura, la distinción fundamental se refiere al acceso proporcionado al núcleo del control o solamente al interface hombre-máquina.
Actualmente la mayoría de los controles abiertos ofrecen interfaces específicos para acceder a la información del control, es decir, se sitúan en el primer caso. Existen otros fabricantes que además facilitan herramientas de desarrollo software que permiten acceder y particularizar el núcleo del control. Y no existe ningún suministrador que ofrezca un control abierto que se sitúe en el tercer caso. Conviene introducir en este momento el elemento tiempo real, en este sentido hay que decir que en el primer caso el acceso ofrecido a la información del control no permite garantizar el tiempo de acceso y por lo tanto la sincronización. Por ello los datos proporcionados son útiles si no están sujetos a requerimientos de tiempo estrictos (como los manejados en el núcleo del control) o si se van a utilizar para visualizarlos en el interface de usuario.
En cualquier caso, desde que surgieron las nociones de interfaces abiertos (arquitectura OSACA [2]) la tendencia de los suministradores de controles ha ido en la dirección de ofrecer mayor apertura para el usuario, simplificándose de esta forma la integración de funcionalidad adicional y software de terceros.
Es necesario decir que un sistema de control abierto con interfaces independientes del fabricante permite integrar componentes proporcionados por otros suministradores especializados facilitándose las sinergias entre ellos. Además, simplifica la integración de funcionalidad adicional y software de terceros; haciendo posible que los fabricantes de los controles se concentren en la mejora de lo más importante en su producto, los algoritmos de control y aprovechen el software existente para proporcionar funcionalidad relacionada con el sistema operativo o con los protocolos de comunicación.
El fabricante de la máquina resulta beneficiado por las posibilidades que se le ofrecen para integrar su propio know-how y para especializar determinados componentes del control. Como ejemplos se pueden citar la implementación de transformaciones de coordenadas imprescindibles en máquinas de cinemática paralela o de componentes para control del proceso de utilidad para adecuar el comportamiento de la máquina en función del estado del proceso. Además, simplifica la modificación o sustitución del interface de usuario sin modificar el resto del control. Esto permite uniformizar el interface de usuario de todas las máquinas herramienta utilizadas en una planta independientemente del control utilizado.
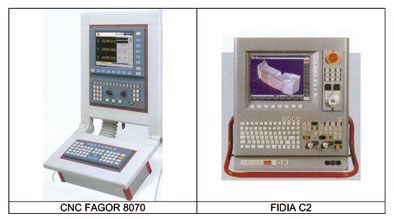
Figura 2: Controles abiertos comerciales (I)Sistemas de Control Abiertos Comerciales
Uno de los principales requerimientos para la fabricación de sistemas de control abiertos es que los componentes hardware y software integrados en el sistema estén basados en estándares. Históricamente cada fabricante de control desarrollaba su propia plataforma hardware, su sistema operativo en tiempo real, su software de control y su interface de usuario. Además de facilitar la integración con los componentes para el control de ejes, normalmente mediante interfaces analógicos.Por lo tanto, su dependencia con respecto a la plataforma hardware utilizada es muy fuerte. En los últimos años los sistemas basados en microprocesadores han seguido una tendencia de mejora de su capacidad de cálculo de una forma acelerada, incluso de podría hablar de exponencial. Ello ha contribuido a que el ciclo de vida de las plataformas hardware sobre las que se desarrollan los sistemas de control sea cada vez más corto. Y los fabricantes de controles cada vez disponen de menos tiempo para recuperar su inversión en desarrollo de los nuevos productos. La utilización de plataformas hardware estándar permite al fabricante utilizar permanentemente los microprocesadores más recientes de la familia correspondiente, con las últimas características en cuanto a potencia de cálculo, memoria, etc.
Por ello se ha producido una tendencia hacia la unificación de las plataformas hardware, plataformas que proporcionan microprocesadores ampliamente utilizados para los que existe gran cantidad de opciones en cuanto a sistemas operativos, entornos de desarrollo, etc. Estas plataformas incluyen además gran cantidad de opciones para el aprovechamiento de gran cantidad de periféricos estándar, como sistemas de almacenamiento (discos duros, memorias flash), de comunicaciones (líneas serie, paralelo, USB, Ethernet), de interacción con el usuario (controladoras de video y monitores estándar, teclado y ratón). En definitiva, el uso de plataformas hardware estándar permite a un fabricante aprovechar una gran cantidad de periféricos que de otra forma debería desarrollar o integrar en su plataforma propietaria.
Hoy en día, la plataforma hardware basada en la tecnología PC es claramente la opción de los principales fabricantes de sistemas de control. Entre sus ventajas se pueden mencionar :
- Bajo coste.
- Disponibilidad de gran número de proveedores y cortos plazos de entrega.
- Gran actividad en innovación, cualquier nuevo periférico cuenta con su versión para dicha plataforma.
- Disponibilidad de estándares y protocolos para soportar cualquier tipo de periférico.
En lo referente a los sistemas operativos, la tendencia es a la utilización de sistemas estándar de facto como la familia de Microsoft Windows. Ello permite disponer de soporte inmediato para cualquier dispositivo o periférico desarrollado para la plataforma PC. Y permite disponer de varios entornos de desarrollo y compiladores para diversos lenguajes de programación, de herramientas de desarrollo y simulación, así como de gran cantidad de aplicaciones para gestión y tratamiento de la información, diseño, comunicaciones, etc. En definitiva, cualquier aplicación software para la familia Windows puede ser utilizada.
Figura 2: Controles abiertos comerciales (I)Otro aspecto importante está en relación con las interfaces para la comunicación entre el control numérico y los reguladores que comandan los motores de la máquina. Los tradicionales reguladores analógicos que utilizaban un protocolo de comunicación analógico, están siendo remplazados por reguladores digitales de mejores prestaciones. Para comandarlos existe el bus de campo estándar SERCOS, específicamente desarrollado para la comunicación entre un control numérico y los reguladores digitales. Aunque diversos fabricantes de controles disponen de sus propios buses de campo propietario, también soportan dicho estándar.Por último, la comunicación entre el control y los módulos de entradas y salidas remotos, también tiende fuertemente hacia la utilización de buses de campo estándar. Existe una gran variedad, pero entre los más usados podemos citar CAN, Profibus, DeviceNet, Interbus. Como ocurría con los sistemas de comunicación descritos en el apartado anterior, en este caso también existen fabricantes, que además de soportar diversos estándares, disponen de sus propios productos propietario. Finalmente, debemos subrayar que los principales fabricantes de controles numéricos disponen de productos basados en plataformas PC y sistema operativo Windows. Es el caso de los controles numéricos Fagor 8070, Fidia, Siemens 840, HeidenhainiTNC530, Fanuc.
El uso de dicha plataforma Windows trae consigo una serie de ventajas de las que difícilmente dispondríamos si nos basáramos en sistemas operativos propietarios :
- Acceso a toda la información de la Máquina Herramienta disponible en el CNC.
- Mejora en la explotación de las capacidades de los Controles Numéricos Abiertos.
- Beneficios y ventajas inherentes a la integración en un PC con SO Windows:
- Acceso a Red de Área Local, para transferencia de ficheros, ejecución remota de programas pieza y acceso a los recursos en red de la empresa.
- Desarrollo de aplicaciones que proporcionen nueva funcionalidad mediante la utilización de herramientas de desarrollo de software estándar en el entorno Windows.
- Seguridad proporcionada por el Sistema Operativo.
- Beneficios derivados de la posible utilización de otras aplicaciones comerciales desarrolladas para Windows.
Luis Fernando Cantor BuenoIng. Electronica , CRF

Re: Efecto Cheerios
En mecánica de fluidos se conoce como "efecto Cheerios" a la tendencia de pequeños objetos flotantes para atraerse unos a otros debido a una combinación de la tensión superficial y la flotabilidad. Bautizado en honor a los famosos cereales para el desayuno, cualquiera que los pruebe puede observar como las últimas unidades de cheerios (o cualquier otro tipo de cereales de granos uniformes) que flotan en la leche tienden a agruparse entre sí o se aferra a los lados del tazón formando grupo, facilitando a la cuchara recoger los copos rezagados con facilidad.
A la superficie de la leche, como a toda interfaz líquida, no le gusta deformarse (con la tensión superficial se resiste), pero al mismo tiempo, la gravedad está tirando de loscheerios individuales para hundirlos. Coloque un cheerio en un tazón de leche y su peso hará que la leche debajo de él lo moje ligeramente, formando un hueco en la superficie del líquido.
Un segundo cheerio formará también su propio hueco en la superficie de la leche, y si estos dos cheerios a la deriva pasan los suficientemente cerca entre sí, ambos huecos se unen y los copos parecen "caer" uno sobre otro, como si se tiraran entre sí por una extraña fuerza de atracción.
Este comportamiento se explica también con las burbujas de la cerveza o el vino espumoso, cuando tras unos segundos de ser servidas, las burbujas tienden a agruparse en el centro del vaso para posteriormente ir a la deriva hacia las paredes exteriores.
The Cheerio Effect from Tom Laskowski on Vimeo.
Arshad Kudrolli y su colega Michael Berhanu, ambos físicos en la Universidad Clark, en Worcester, Massachusetts, querían explorar este efecto con el fin de comprender mejor los fenómenos similares que ocurren en el mundo natural. Así que en vez de ir al supermercado a por cereales, pusieron esferas de cristal flotando en un recipiente en forma de embudo relleno de agua. Al alterar la cantidad de agua en el recipiente, las esferas de vidrio tendían a concentrarse o dispersarse, simulando las diferentes fases del"efecto Cheerios".
Hay muchos ejemplos de efectos similares en la naturaleza, por lo que los físicos piensan que desarrollando este modelo de laboratorio se puede ayudar a nuestra comprensión cualitativa de sistemas más complicados. Una mejor comprensión del "efecto Cheerios" podría dar a los científicos una visión más clara de cómo ciertos insectos caminan sobre el agua; o cómo lograr la creación de micro-estructuras que utilizan la tensión superficial para unirse entre sí. Incluso se podría encontrar algunas de las claves que rigen nuestro gran desconocido, el Universo.
Kusrolli y Berhanu encontraron que cuando se lanza un puñado de cheerios en un tazón de leche éstos se unen formando grupos hexagonales, pero cuando tienes muchas partículas dispersas en un área más grande, como por ejemplo millones de partículas de polen flotando en un lago, éstas se reunen en áreas condensadas con grandes lagunas de espacio vacío entre los grupos.
Aunque el motor que lo rige es diferente, afirman los investigadores, este mismo efecto también se puede ver en el cosmos: grandes grupos de galaxias formadas por estrellas que se atraen estrechamente entre sí, dejando una gran cantidad de espacio vacío entre estas galaxias. "Si nos fijamos en la distribución de estrellas y galaxias, no es al azar", afirma Kudrolli. "Hay regiones que son menos densas y hay regiones que son más densas".
Sería gracioso que el origen del Universo llegara a explicarse dejándonos mecer por la familiaridad de unos simples copos de cereal mojados en leche. Aunque la cercanía y naturalidad de las cosas no significa que sean simples o podamos comprenderlas; es en este punto donde los investigadores están obligados a explicar los efectos más insignificantes en el laboratorio, para luego poder llegar desde lo particular a lo general, al origen de todo lo que nos rodea.
Para mejor referencia vease http://www.youtube.com/watch?v=FxkSq1sZbA0
Luis Fernando Cantor Bueno
Ing. Electronica 19135529


Re: Tecnologia del automovil
Motores
El automóvil ha sido propulsado desde sus inicios por diferentes tipos de motores, como por ejemplo el eléctrico, el de vapor y preferentemente el motor de combustión interna alternativo .El elevado peso del sistema de caldera y agua y la autonomía reducida del sistema eléctrico, junto con la disponibilidad de combustibles baratos hicieron que el motor de combustión interna alternativo primero el de gasolina (Ciclo Otto) y luego el motor diesel eliminasen por completo a los otros dos.
Desde 1940 se fabrican motores Wankel, de mayor rendimiento. Consisten en un rotor casi triangular que gira sobre un eje excéntrico dentro de una cámara elíptica. Consiguen una potencia mucho mayor, igual de fiable y con un par motor más constante que en un motor de pistones. Está basado en la idea original de motor de Otto, pero que no se pudo desarrollar por no existir unos materiales que aguantaran la potencia y rozamiento que generaban; además de pecar de un exceso de consumo de aceite.
Entrando en materia, decir que de entre las diferentes clases de motores que existen, nos ocuparemos de los térmicos y dentro de éstos, de los de dos y cuatro tiempos que utilizan como combustible gas-olina (motores de explosión) o gas-oil (motores de combustión).
Estos motores basan su funcionamiento en la expansión, repentina, de una mezcla de combustible y aire en un recinto reducido y cerrado. Esta expansión, puede ser explosión o combustión según se trate de un motor de gas-olina o diesel. Para que se logre, debe mezclarse el carburante con aire, antes de entrar en los cilindros en los motores de gas-olina o una vez dentro en los de gas-oil, en una proporción, aproximada, de 10.000 litros de aire por 1 de carburante.
En la combustión, la mezcla, arde progresivamente, mientras que en la explosión, lo hace, muy rápido.
Los gases procedentes de la combustión, al ocupar mayor volumen que la mezcla, producen una fuerza que actúa directamente sobre la cabeza del pistón y hace que ésta se mueva, véase figura 1.
Este movimiento producido es recogido por la biela, que está unida al pistón por su pie de biela y a éste, por medio de un bulón. En la unión de la biela y el pistón, para atenuar el rozamiento, se interponen unos casquillos. La biela se une por la cabeza de biela al cigüeñal, que es un eje de material resistente y con tantos codos como cilindros tenga el motor. Acaba el cigüeñal en una rueda o volante pesado (contrapeso) con el objeto, de que acabado el tiempo de la explosión, no pierda sentido de giro, venciendo los puntos muertos hasta que se produzca una nueva explosión. Todos estos elementos van encerrados en un bloque que por su parte inferior se cierra con una bandeja, llamada cárter. Del bloque asoman los extremos del cigüeñal al que sirve de apoyo, este punto, recibe el nombre de bancada, para que el cigüeñal no se deforme por efecto de las explosiones, se intercala otra bancada.
Sistema de Lubricacion
Es el encargado de mantener perfectamente engrasadas todas y cada una de las piezas que se encuentran en contacto con otras y que están sometidas a movimiento. Sus objetivos son: Reducir al máximo el rozamiento entre las piezas en contacto para evitar que se calienten y puedan llegar a fundirse provocando el denominado gripaje, Refrigerar las piezas del motor. Constituido principalmente por: Bomba de aceite, Filtro de aceite, Circuito de engrase.
Los motores modernos son lubricados ya sea mediante un sistema de circulación alimentado a presión o mediante una combinación de alimentación a presión y salpicadura. En un sistema completamente a presión, el aceite se pasa por un filtro antes de pasar a la bomba del aceite que es movida por el árbol de levas. El aceite proveniente de la bomba se divide en dos o más flujos; uno de ellos entra al filtro y regresa al deposito de aceite, un segundo flujo va hasta los cojinetes principales y mediante conductos taladros a graves de los brazos del cigüeñal hacia los cojinetes de las balas, un tercer flujo continua hasta los cojinetes del cigüeñal; puede llegar un cuarto flujo a una flecha hueca que soporta a los balancines y él levanta válvulas. El aceite que escurre por él levanta válvulas lubrica las punterías y las levas. Las paredes del cilindro reciben suficiente aceite de los sobrantes por exceso provenientes de los cojinetes de las bielas. Por esto, un cojinete de biela flojo puede sobrecargar a los anillos que controlan el aceite, como para que surja una falla en la bujía. En vista de que es costoso el barrenado del cigüeñal y de las bielas, se pueden colocar debajo de cada biela, artesas que se mantendrán llenas de aceite proveniente de la bomba. Una saliente en el extremo de la biela, se sumerge en la artesana y forma un rocío de aceite para lubricar el cojinete de la biela, las paredes del cilindro y el pasador del embolo.
Montaje y desmontaje de un motor
En primer lugar identificamos cuál es el motor que vamos a desmontar y cogemos el manual que le corresponde. Una vez que tengamos el manual, seguimos el orden de desmontaje que nos indica. Lo primero en hacer sería soltar todos los componentes externos del mismo: bobina, delco, alternador, motor de arranque, caja de cambios, embrague, volante motor, bomba de gasolina, colector de admisión con el carburador (todo en uno), y el colector de escape. Después de realizar el desmontaje de estas piezas, lo que nos queda es lo siguiente: la tapa de balancines, la culata, el bloque y el cárter. Todavía la distribución está montada. Llegados a éste punto o bien al principio vaciamos el aceite del motor y retiramos el filtro del aceite. Soltamos la tapa de distribución, aflojamos el tensor de la correa de distribución y retiramos la correa. Siempre que se vaya a hacer ésta operación, aunque no tenga mucha importancia de que si está en marcas o no, es conveniente coger como costumbre realizar esto poniéndolo antes en sus marcas. Luego soltamos los tornillos que sujetan tanto a la polea de distribución del árbol de levas como a la polea de distribución del cigüeñal. En nuestro caso el motor está agarrotado y no gira pero como norma siempre es necesario bloquear las poleas para poder soltarlas; tendremos mucho cuidado con las chavetas en no perderlas(las poleas tienen un único sentido de montaje). Ahora soltamos la tapa de balancines, luego los sombreretes del árbol de levas teniendo en cuenta que soltaremos progresivamente y desde el centro hacia el exterior(en forma de caracol).Luego retiramos los taques hidráulicos, se tendrá en cuenta la posición de origen de los sombreretes y taques para el montaje que si fuese necesario deberían de marcarse. Así podremos retirar el árbol de levas con mucho cuidado ya que sólo tiene una posición de salida y entrada (si nos fijamos en el árbol de levas vemos a simple vista que varía su anchura). Continuamos soltando y tenemos que soltar la culata; para esto tenemos que soltar los tornillos de la culata de dentro hacia fuera y de forma progresiva. Así, una vez soltados los tornillos retiramos la culata con especial cuidado para que no rompamos la junta culata. Le damos la vuelta al conjunto que nos queda que son el bloque y el cárter, para poder soltar los tornillos del cárter. Quitamos el cárter y nos queda a la vista el prefiltro de aceite que va con dos tornillos; así que lo soltamos. Después soltamos la bomba de aceite que está situado en el lado de la distribución. Tendremos especial cuidado al soltarlo lleva pues un retén que hace de cierre entre el cigüeñal y el bloque. En el otro lado también soltamos una tapa que hace de cierre con el cigüeñal mediante otro retén. Soltamos los sombreretes de biela que van marcadas y numeradas para saber luego como se deben de montar y en que cilindro cada uno; tendremos cuidado con los casquillos para que no se mezclen ya que éstos también deben de respetar el sitio de origen en el montaje. Sacaremos los conjuntos de pistones y bielas y las pondremos según la posición que les corresponde en los cilindros aunque estén numeradas. Después les quitaremos los segmentos; tres a cada pistón. Es muy importante no mezclar los segmentos de un pistón con los de otro, pero tampoco se han los del mismo ya que cada uno tiene su función y ubicación. Despues de sacar los segmentos en cada pistón , el de fuego, el de estanqueidad y el de rascador de aceite los limpiamos y montamos en su sitio, previa limpieza de las gargantas con un util apropiado o un segmento partido.
Luego soltaremos los sombreretes del cigüeñal que van marcadas con una flecha y numeradas para saber donde habrá que montarlas luego. Para soltar el cigüeñal los tornillos de los sombreretes desde dentro hacia afuera o en forma de caracol y progresivamente; tendremos cuidado de no mezclar los casquillos que lleva. Ya que tenemos todo desmontado habrá que limpiar todas las piezas bien con la pistola a presión bien en la lavadora; las piezas que no se van a limpiar son las siguientes: alternador, motor de arranque, embrague, caja de cambios, delco y colector de admisión con su carburador. Todo lo demás lo limpiamos. Una vez limpiados los aclaramos con agua caliente a presión y los secamos con la ayuda de aire a presión y con papel o un trapo. Más tarde lubricaremos con aceite todos los componentes que se hayan limpiado para evitar así su oxidación. Ahora proseguiremos con la medición de los componente que se nos indica en la hoja de trabajo que se nos ha facilitado. Estos componentes son los que sufren desgastes por eso su medición es muy importante ya que una anomalía de estas piezas influye en el mal funcionamiento del motor.
1. Los cilindros: En primer lugar, examinaremos los cilindros visualmente comprobando que no presente ningún desgaste anormal, es decir que no se aprecie rayas o señales de agarrotamiento. Posteriormente efectuaremos la medición, con un calibre provisto de un comparador en tres alturas distintas dentro de la carrera en los sentidos longitudinal y transversal.
2. Juego de cilindro-pistón: Metemos cada pistón en su correspondiente cilindro sin segmentos y con la ayuda de las galgas medimos la holgura.
3. Control del cigüeñal: Con la ayuda de un micrómetro, medimos el espesor de los semicasquillos axiales que son dos. Luego, cuando el cigüeñal se encuentre debidamente montado con un reloj comparador medimos el valor del juego axial. También se deben de medir los apoyos de bancada con un micrómetro. También las muñequillas de biela; los dos con micrómetro y su diámetro máximo y mínimo para ver su conicidad.
4. Control de juego entre puntos de segmento: Cogemos los segmentos de uno en uno y los vamos introduciendo cada uno en su cilindro y con unas galgas comprobamos la abertura que les queda en frío porque en caliente debería de ser cero.
5. Control del árbol de levas: colocamos el árbol de levas en unos apoyos de tal forma que pueda girar libremente, y luego con la ayuda de un reloj comparador, medimos la alzada de la leva.
6. Control de ovalamiento de los apoyos del árbol de levas con la ayuda de un micrómetro, medimos en los dos extremos para saber su diámetro máximo y mínimo y así sacar el ovalamiento.
7. También realizaremos un control visual sobre el árbol de levas, el cigüeñal y la culata. Nos aseguraremos que no presenten grietas ni golpes y también que estén excéntricas y la culata esté plana. También realizaremos un control sobre las demás piezas.
Luis Fernando Cantor Bueno
Ing. Electronica, CRF
Re: Tecnologia del automovil
Concepto de Transmisión
Se le llama transmisión al conjunto de bandas cadenas o engranes que sirven para comunicar fuerza y movimiento desde un motor hasta su punto de aplicación. Recibe el nombre de tren de engranes el conjunto de éstos que se encuentran endentados entre sí, ya sea directamente o por medio de cadenas. La figura Nº 1 nos muestra un ejemplo y como podemos observar, el engrane "M" (motor) hace girar a los engranes "m" (movidos) notándose que en cada paso se invierte el sentido de giro.
Transmisión por cadena
En el caso de la transmisión por cadena, el movimiento y la fuerza se transmiten a cierta distancia de los engranes y se conserva el sentido de giro. Además del cambio del sentido de giro existen otros conceptos que es necesario conocer para la comprensión total del trabajo de una transmisión. Uno de ellos es la relación de transmisión. La relación de transmisión es la proporción entre el número de dientes de un engrane en comparación con su pareja de trabajo. En la figura Nº 3 tenemos una relación de 2:1 en donde el engranaje motor dará dos vueltas para que el engranaje conducido gire sólo una.Una relación de transmisión adecuada para el trabajo que se debe realizar es un factor determinante pues en función de ella se pueden modificar otros factores. Veamos la
donde se puede ver el manejo de las revoluciones por minuto. El número de R.P.M. establece la cantidad de vueltas que un engrane da durante un minuto. Según el ejemplo anterior, el engranaje motor gira a 100 R.P.M. y, debido a su relación, el engranaje conducido gira a sólo 50 R.P.M. o sea a la mitad de las R.P.M. del primero. Ha perdido
velocidad. Sin embargo, en estos asuntos de la tecnología, cuando pierdes algo ganas otra, que en este caso es torque. Como ya sabemos, el torque, par motor o torsión, es la capacidad para realizar un trabajo independientemente del tiempo que se tarde en hacerlo.
cuando el engranaje conducido da la mitad de la velocidad, entrega el doble de torque. Esta relación inversamente proporcional entre las rpm y la torsión es una constante en todo tipo de transmisiones.
Con estos antecedentes podemos definir una transmisión a base de engranes como un convertidor mecánico de torque. Con este concepto en mente pasemos a ver cómo es que se aplica en un automóvil. Primeramente debemos saber que existe algo llamado inercia y que se puede manifestar de dos maneras distintas: la inercia estática y la inercia dinámica Cuando un objeto se encuentra estacionario se requiere de la aplicación de una fuerza para ponerlo en movimiento. Dicha fuerza deberá ser superior al peso del objeto pues de otra manera no podrá moverlo, es decir, no podrá sacarlo de su inercia estática. A un automóvil parado deberemos aplicarle entonces una fuerza superior a su peso a fin de hacerlo rodar, pero una vez iniciado el movimiento y en la medida que se incremente la velocidad de rodaje, se requerirá cada vez menos fuerza para seguirlo acelerando. Esto significa que una masa acelerada puede mantenerse así con poco consumo de fuerza y requerirá también de muy poca para acelerarla más. Un automóvil está dotado con una transmisión diseñada según las características del vehículo y el servicio que se espera de él. Así podemos encontrar transmisiones de 3, 4, 5 o más "velocidades", lo que significa que tendrá disponibles 3, 4, 5 o más relaciones de transmisión, y que por cada relación o "cambio" estará trabajando una pareja de engranes.
Mantenimiento de la transmisión y frenado de un vehiculo
la 1ª velocidad está formada por una pareja de engranes que proporciona un elevado torque, necesario para sacar al vehículo de la inercia estática. Una vez avanzando el vehículo, las relaciones seleccionadas en los cambios subsecuentes hasta la 5ª velocidad van disminuyendo el torque obtenido e incrementando las R.P.M. de salida. Asimismo, se
puede apreciar que en la 5ª relación existe una multiplicación de las R.P.M. debido a que el engranaje motor es algo mayor que el movido; de este modo el vehículo avanzará a gran velocidad y el motor marchará a un régimen de R.P.M. más bajo que en 4ª con la consiguiente economía de combustible. Sólo falta decir que la 5ª relación carece de torque por lo que no es adecuada para subir cuestas empinadas. En una transmisión manual, la selección de la relación de engranes se efectúa por medio de una palanca que desplaza un mecanismo deslizable llamado sincronizador para comunicar el movimiento y la fuerza a la flecha de salida. se observa el patrón de movimientos para conectar cada uno de los cambios disponibles, incluyendo la reversa. Para terminar esta parte diremos que la transmisión proporciona también una posición neutral en donde no se encuentra
seleccionada ninguna pareja de engranes, lo que permite que el motor esté funcionando con el vehículo parado y sin pisar el pedal del embrague o clutch; esta posición es conocida como "neutro".
Embrague o clutch
Para poder efectuar los cambios de velocidad, el vehículo dispone de un mecanismo que desacopla el movimiento giratorio del motor hacia la transmisión o "caja" de velocidades; esto es conveniente para hacer los cambios con suavidad. Opera el desacoplamiento al oprimir el pedal y acopla nuevamente al liberarlo. Su accionamiento también permite tener conectada una relación sin que el vehículo se mueva. Se encuentra un esquema simplificado que ilustra la operación del embrague.
Conducción Final
Sea cual sea la relación de transmisión seleccionada con la palanca, la fuerza deberá pasar necesariamente por una última relación, altamente multiplicadora (elevador de torque), formada por un piñón y una corona; es de esta corona de donde se toma la fuerza
para las ruedas de tracción. Esta pareja de engranes recibe el nombre de conducción final o diferencia.
Condiccion Diferencial
Cuando un vehículo marcha en línea recta todas las ruedas giran a la misma velocidad y dan el mismo número de vueltas, pero al voltear una esquina o al recorrer cualquier curva, las ruedas exteriores se desplazan una distancia mayor que las ruedas interiores. Para recorrer una mayor distancia en el mismo tiempo, las ruedas exteriores deberán girar más rápido que las interiores. Esta diferencia de giros no tiene importancia en los ejes traseros con ruedas locas pero en las ruedas de tracción, que se encuentran engranadas en la conducción final, resulta indispensable el compensar la diferencia en el número de vueltas, que conlleva también el reparto proporcional del torque. Hacer este trabajo es la función del engranaje diferencia. El conjunto del diferencial consta de dos engranes llamados planetarios o planetas que le entregan movimiento a los semiejes, mediante unas estrías interiores. Estos planetarios están engranados con otros piñones cónicos llamados satélites que van instalados dentro de la caja de la corona los que permiten, por ejemplo, hacer girar una rueda más que la otra en una curva. El diferencial puede describirse como un conjunto de engranajes donde los satélites funcionan como simples transmisores del movimiento cuando el vehículo avanza en recta trasladándose entre los planetarios sin girar sobre sí mismos; sin embargo cuando el vehículo da vuelta, los satélites giran sobre sí mismos (rotan) permitiendo que un planetario gire más rápidamente que el otro .
Luis Fernando Cantor Bueno
Ing. Electronica, CRF
Re: Tecnologia del automovil
Carrocería
Constituye el elemento de protección y alojamiento para los ocupantes y los órganos mecánicos. Tradicionalmente se soportaba en un chasis, siendo hoy día estructural,por motivos de peso y de seguridad, pasando el chasis a formar parte integrante de la misma . El chasis sin embargo permanece por motivos de robustez, para los vehículos industriales y de transporte a partir de un cierto tonelaje, así como para los Todo-terreno de mayores exigencias.
Chasis independiente
La técnica de construcción de chasis independiente utiliza un chasis rígido que soporta todo el peso y las fuerzas del motor y de la transmisión. La carrocería, en esta técnica, cumple muy poca o ninguna función estructural.
Esta técnica de construcción era la única utilizada hasta 1923, año en el que se lanzó el primer automóvil con estructura monocasco, el Lancia Lambda. Las carrocerías autoportantes, a lo largo del siglo XX, fueron sustituyendo al chasis independiente. Actualmente sólo se construyen con chasis independiente varios vehículos todoterreno, deportivo utilitarios, y la mayoria de las camionetas grandes y algunas de las camionetas ligeras asi como varios automóviles americanos.
Los primeros chasis independientes eran de madera, heredando las técnicas de construcción de los coches de caballos. En los años 1930 fueron sustituidos de forma generalizada por chasis de acero.
Existen chasis con bastidores de largueros en forma de escalera; dos travesaños paralelos longitudinales cruzados por travesaños transversales, con travesaño en forma de X y de tubo central (Backbone frame → en).
En Estados Unidos el chasis independiente duró más que en otros países, ya que la costumbre estadounidense del cambio anual de diseño era más difícil con estructuras monocasco. Desde los años 90 la mayor parte de los automóviles de pasajeros utilizaron la construcción monocasco; sólo los camiones, autobuses, todoterrenos para uso rudo y automóviles grandes siguen usando el chasis independiente, si bien cada vez más ha incorporado la estructura autoportante.
El chasis independiente sigue siendo el preferido para vehículos industriales, que han de transportar o arrastrar cargas pesadas. De entre los pocos automóviles de gran serie que se siguen fabricando con chasis independiente destacan el Ford Crown Victoria (→ en), el Mercury Grand Marquis (→ en) y el Lincoln Town Car (→ en) . Las ventajas son la facilidad de reparación en caso de colisión (lo que le hace ser preferido como vehículo policial) y de alargar para hacer una limusina.
Autoportante
En la carrocería autoportante es una técnica de construcción en la cual la chapa externa del vehículo soporta algo (semi-monocasco) o toda la carga estructural del vehículo.
El primer vehículo en incorporar esta técnica constructiva fue el Lancia Lambda, de 1923. Los primeros vehículos de gran serie en tener carrocería autoportante fueron el (en inglés) Chrysler Airflow y el Citroën Traction Avant. El Volkswagen Escarabajo de 1938 tenía una carrocería semi-monocasco, ya que tenía chasis independiente, pero este necesitaba también de la carrocería para soportar el peso del vehículo. La Segunda Guerra Mundial supuso un alto en el desarrollo automovilístico. Tras la guerra, la carrocería autoportante se fue difundiendo. El Morris Minor de 1948 fue un vehículo de posguerra que adoptó tempranamente la técnica. El Ford Consul introdujo una variante de carrocería autoportante llamada unit body o unibody, en la cual los distintos paneles de la carrocería se atornillaban a una estructura monocasco. Otros vehículos (por ejemplo el Chevrolet Camaro de 1967) utilizaron una técnica mixta, en la cual un semi-monocasco se combinaba con un chasis parcial (subchasis) que soportaba el motor, el puente delantero y la transmisión. Esta técnica trataba de combinar la rigidez y la resistencia de la carrocería autoportante con la facilidad de fabricación del vehículo con chasis independiente, actualmente este sistema se encuentran en algunas SUV´s de las marcas Japonesas Toyota, Mitsubishi y Suzuki para obtener mayor rigidez torsional y tener a la vez la ventaja monocasco en Suv´s que requieran mayor resistencia a malos tratos. Los inconvenientes eran desajustes entre el chasis parcial y la carrocería, solucionado ahora con puntos de suelda de nueva generación y adesivos especiales.
Actualmente, casi todos los automóviles se construyen con la técnica de monocasco, realizándose las uniones entre las distintas piezas mediante soldadura de puntos. En los vehículos modernos, hasta los cristales forman parte de la estructura del vehículo, colaborando en darle fortaleza y rigidez.
Tubular
La carrocería tubular o superleggera ("superligera" en italiano), es un tipo de carrocería utilizado en vehículos clásicos deportivos de mediados del siglo XX y por los grupos B de los años 80. Fue creada por el carrocero italiano Touring en 1937. Esta técnica utiliza como estructura del vehículo una red de finos tubos metálicos soldados, recubierta después con láminas metálicas, frecuentemente de metales exóticos tales comoaluminio o magnesio. Esta técnica consigue una carrocería de gran rigidez y resistencia con muy poco peso. Por otra parte, la fabricación es muy cara y laboriosa. La técnica todavía se utiliza en modelos deportivos hechos a mano.
Carrocería según el numero de volúmenes
Monovolumen
Un monovolumen es una carrocería en la que no se diferencia más de un volumen. La zona del motor, la cabina y el maletero están completamente integrados. Generalmente, un monovolumen es más alto que un automóvil de turismo (1,60 a 1,80 metros contra 1,40 a 1,50 metros). Los monovolúmenes grandes y algunos compactos (desde 4,40 metros en adelante) tienen frecuentemente tres filas de asientos, mientras que los más pequeños sólo tienen dos filas.
Tres volúmenes
En un tres volúmenes o tricuerpo se distinguen claramente los tres volúmenes: un volumen para el capó con el motor, otro volumen para el habitáculo y un tercero para el compartimento de carga.
Los sedanes son casi siempre tricuerpos, y numerosos cupés también los son. Algunas raras excepciones a esta regla son el SEAT Toledo de primera generación y el Daihatsu Applause.
Carrocería según su forma
Sedán
Sedán es un tipo de carrocería típica de un automóvil de turismo; es un tres volúmenes en el que la tapa del maletero no incluye al vidrio trasero, por lo que éste está fijo y el maletero está separado de la cabina. El maletero se extiende horizontalmente desde la parte inferior de la luna trasera algunas decenas de centímetros hacia atrás. La cantidad de puertas es la de las puertas laterales, prácticamente siempre dos o cuatro. En cambio una "Berlina" es un término que describe un diseño de automóvil que consiste en una cabina o área para pasajeros con un espacio de carga (maletero) integrado al cual se tiene acceso mediante un portón trasero. Este portón incluye el vidrio trasero y el voladizo trasero es relativamente corto. El portón trasero se considera una puerta más, por lo que los hatchback con dos puertas laterales se denominan "tres puertas" y los modelos con cuatro puertas laterales son "cinco puertas".
Familiar
Un familiar, rubia, ranchera, estanciera o rural es un automóvil con el techo elevado hasta el portón trasero, que sirve para acceder a la plataforma de carga. Los fabricantes suele utilizar los términos correspondientes en otros idiomas: "Break" en Francia, "Kombi", "Tourer" o "Touring" en Alemania y Suecia, "Station Wagon" en inglés norteamericano y "Estate" en inglés del Reino Unido. Dado que los términos familiar y station wagon tienen, para ciertos compradores, cierto estigma de designar a vehículos aburridos, algunos fabricantes han creado nombres alternativos, más sugerentes y estimulantes, para sus versiones familiares. Cabe destacar que el Volvo 240 Familiar ha salido en innumerable de películas en Hollywood, estrella por si solo.
Woodies
Estos vehículos fueron denominados "rubias" en España, dado que la madera con la que se construían solía ser de color claro. Era normal que, al hablar en en una revista especializada española contemporánea de, digamos, un Seat 1500 Familiar, se le llamase "Seat 1500 Rubia", a pesar de que no hubiese madera auténtica ni simulada en este vehículo. Otras denominaciones para esta carrocería (y para el "Familiar") fueron Ranchera y Jardinera. La historia del woodie (de wood, "madera" en inglés, y woodie, "hecho de madera") es una historia de cambios tecnológicos y sociales. En los años 1920, algunos carroceros empezaron a adaptar chasis de sedanes para transportar bultos. Esta adaptación les daba una forma muy parecida a lo que actualmente llamamos familiar o station wagon. Dado que los coches de aquella época tenían el chasis independiente de la carrocería, era posible hacer cambios en la carrocería sin afectar a al estructura básica del vehículo, por lo que los paneles de carrocería modificados solían ser de madera, ya que este material hacía posible una transformación artesanal, dado que el estampar paneles metálicos requiere de una gran inversión inicial. En aquella época el coche era aún un artículo minoritario, y el método de transporte más popular era el ferrocarril, surgiendo así para muchos hoteles el problema de que sus clientes necesitaban transportar maletas y bultos desde la estación de ferrocarril hasta el hotel. Los hoteles, consecuentemente, adquirieron flotas de estos vehículos para transportar maletas de clientes desde la estación del tren hasta el hotel. De ahí el nombre "Station Wagon". En los años 1930 empezaron a aparecer woodies de lujo. Probablemente por la asociación mental del woodie con el tiempo de ocio y los hoteles de lujo que los empleaban. Lejos de la connotación utilitaria y comercial que el "Familiar" tuvo en Europa, en Estados Unidos el "Woodie" era muchas veces el tope de gama, un vehículo muy caro y cargado de extras, y un símbolo de status social. Hasta esta época, el woodie tuvo los paneles de madera dictados por necesidades técnicas.
Cupé
Cupé (o coupé) es un tipo de carrocería]] de dos o tres volúmenes y dos puertas laterales. Un cupé se denomina fastback o tricuerpo (notchback), según el ángulo que forma la luneta trasera con la tapa del maletero o del motor. Los cupés, junto con los descapotables, forman el grupo de los automóviles deportivos. Entre las siguientes fotos se puede apreciar un antiguo Ford Model A Coupé y un Auto Union 1000 coupé, precursor de Audi, con techo corredizo de lona, 2 puertas sin pilar tipo hardtop y carrocería semi-fastback, coche muy avanzado en su época y muy popular no solo en su país natal sino también en Brazil y Argentina.
Hardtop
Las carrocerías tipo hardtop o "techo duro" eran una especialidad norteamericana. Consistían en una versión sin pilar B de un vehículo de serie.El propósito del hardtop es conseguir la estética del convertible, pero evitando algunos de sus inconvenientes. Lo más frecuente es que fuesen vehículos de dos puertas, pero también se llegaron a hacer versiones hardtop de vehículos de cuatro puertas e incluso de familiares. El hardtop presentaba algunos inconvenientes:
§ La ausencia del pilar B hacía que el vehículo perdiese rigidez torsional y resistencia en caso de vuelco o accidente. Los Hardtop, por consiguiente, eran frecuentemente chasis o monocascos de convertibles (y por lo tanto reforzados) a los que se añadía un techo fijo. El Hardtop era, por tanto, más pesado que el vehículo normal del que se derivaba, pero con menor rigidez torsional.
§ La falta de pilar B en los Hardtop de cuatro puertas provocaba problemas de ajuste y de filtraciones de agua entre las puertas. A veces, debido a la flexión de la carrocería, las puertas podían llegar a abrirse sobre la marcha al tomar una curva pronunciada.
Luis Fernando Cantor Bueno
Ing. Electronica , CRF
Re: Tecnología robótica en la EEI
Hoy en día el desarrollo de sistemas robóticos para su uso en el espacio se considera prometedor.
Efectivamente, un cuerpo humano tiene muchas restricciones relacionadas con el mantenimiento de su funcionamiento; requiere sistemas complicados y caros, por lo tanto, el uso de robots podría aumentar de forma considerable la posibilidad de investigar el espacio.
En la Estación Espacial Internacional (EEI) se usan varios modelos de robots. Una de las más interesantes es la canadiense Special Purpose Dexterous Manipulator (Manipulador diestro de propósito especial, SPDM por sus siglas en inglés).
El SPDM está destinado para operaciones en el espacio exterior, las que normalmente se efectúan por personas, por ejemplo, reemplazar o reparar equipo instalado en el exterior de la EEI. Es capaz de atornillar y desatornillar pernos, abrir y cerrar paneles, montar y desmontar distintos bloques y piezas. Para ello el manipulador está dotado de dos así llamados "brazos", cada uno de los cuales es de hecho un manipulador independiente. En el extremo de cada brazo está montada una agarradera especial para el trabajo con distintas herramientas.
El cuerpo del SPDM está constituido por dos partes con capacidad de rotación independiente. Ambos extremos de cada cuerpo están dotados de agarradores estándares: por un lado está montado un agarrador tipo LEE (Latching End Effector) del tipo activo; el otro lleva uno de tipo PDGF (Power Data Grapple Fixture), pasivo con posibilidad de transferencia de datos y energía. Mediante estos dispositivos, el SPDM es capaz de colocarse en SSRMS para ser trasladado al lugar de operación, o ubicarse temporalmente en un nodo estándar, montado en la superficie de la EEI. El cuerpo del SPDM también lleva sujeciones para herramientas y una plataforma para llevar cargas. El control del SPDM puede efectuarse por operadores, tanto desde la estación como desde la Tierra. Para el control, la EEI usa estaciones robóticas Robotic Working Station.
Este manipulador fue desarrollado por la misma empresa canadiense que diseño los grandes manipuladores para el transbordador y la EEI. En la imagen se ve que toda la superficie del SPDM lleva un recubrimiento de aislamiento térmico de color claro. En el segmento ruso de la EEI pronto será instalado un manipulador de diseño europeo: el ERA. Está previsto que llegará a la estación junto con el nuevo laboratorio modular, MLM, dentro del cual será instalado.
Luis Fernando Cantor Bueno
Ing. Electronica, CRF




